Duke engineers and scientists have collaborated to create robots that will expand their medical reach.
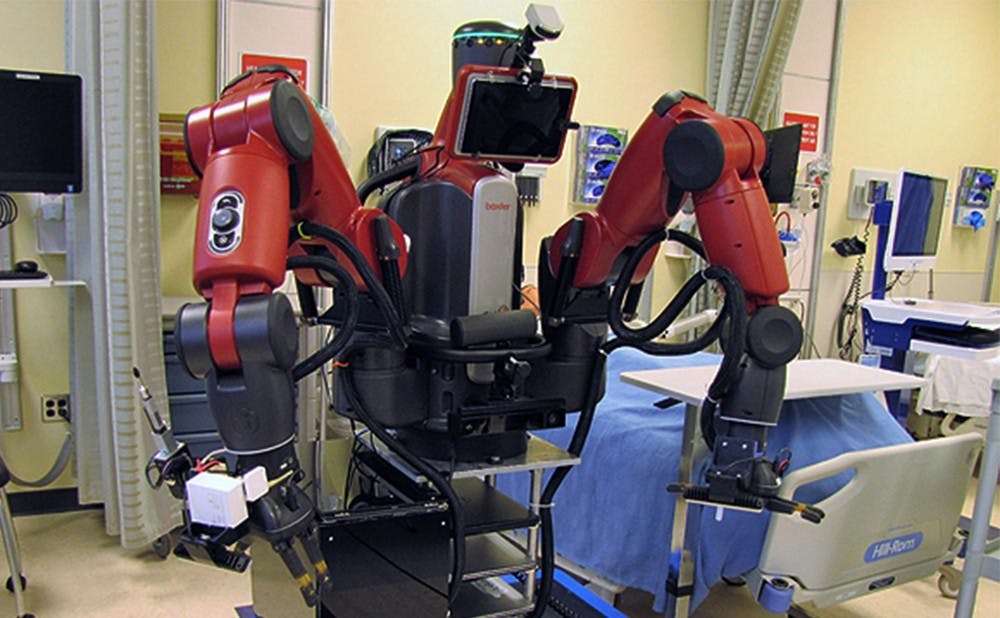
The robots—named Tele-Robotic Intelligent Nursing Assistants—could serve as surrogate nurses in areas that are dangerous for healthcare personnel. Kris Hauser, an associate professor in the department of electrical and computer engineering, said that the project was developed in response to the Ebola outbreak in 2014.
“The National Science Foundation put out a call for engineers and scientists to propose their ideas to respond to Ebola," Hauser said. "We were starting to see many healthcare workers get infected with Ebola, and it just seemed that there was a way that robots could help."
Ryan Shaw, assistant professor in the School of Nursing who also involved with the TRINA project, said the robot is in the first stage of development and can only perform basic tasks. He noted that researchers are working to integrate wireless sensors into the robot.
The second floor of the nursing school—a simulated hospital where nursing students are taught—is being utilized for testing the TRINA project.
“We’re trying to leverage the same space for doing research," Shaw said. "It’s one thing for the robot to move in an environment, but you also need to get data on how someone is doing. As a nurse, you have to insert IVs, pass medications, retrieve blankets and other very common human things."
Hauser added that TRINA is able to partially automate certain tasks, like picking up a glass of water or turning a patient to a different position.
To further advance the robot, nursing students and engineers have been working together. Shaw explained that the nursing students are learning how to drive the robot, and the engineers use those test runs to develop ideas for designing the next version of the robot.
So far, TRINA has been tested with simulated patients in the nursing simulation lab, but Hauser said he hopes it will soon reach the stage of critical testing. The plan is to eventually use the robot in a clinical trial through the Duke Clinical Research Unit.
Currently, the project team is working to make changes to the robot so that it can detect pressure. That will allow the “driver” to know how hard the robot is pressing or grabbing something.
“Because the robot is safe around people, it’s ‘springy.’ If you tell an industrial robot to go somewhere, it would go there but would destroy everything in its path. If [TRINA] hit something, it would bounce back and stop because it has a bunch of springs inside of it," said senior Peter Moran, who previously worked in Hauser's lab. "We need to put on a pointer finger that is really accurate and doesn’t have any springs in it, but is so small that it doesn’t do any damage."
The applications of a “robo-nurse” extend beyond treating patients with infectious diseases, Shaw noted. They could also help clean up toxic spills or care for patients with compromised immune systems.
“There, it’s not the protection to the care worker but the protection of the patient," Hauser said. "You don’t want to bring germs into the patient’s hospital room."
However, both Hauser and Shaw were firm in their belief that TRINA will not replace human nurses.
"They are remote-controlled robots that act as a surrogate body and still need a nurse to drive it,” Shaw said.
Get The Chronicle straight to your inbox
Signup for our weekly newsletter. Cancel at any time.